


Smarta robotgräsklippare anses vara en marknad värd flera miljarder dollar, främst baserat på följande överväganden:
1. Enorm marknadsefterfrågan: I regioner som Europa och Nordamerika är det mycket vanligt att äga en privat trädgård eller gräsmatta, vilket gör gräsklippning till en viktig uppgift i deras dagliga liv. Traditionell manuell gräsklippning eller att anlita arbetare för gräsklippning är inte bara tidskrävande och arbetsintensivt utan också kostsamt. Därför finns det en betydande marknadsefterfrågan på smarta robotgräsklippare som autonomt kan utföra klippuppgifter.
2. Möjligheter till teknologisk innovation: Med den kontinuerliga utvecklingen av tekniker som sensorer, navigationssystem och artificiell intelligens har prestandan hos smarta robotgräsklippare kontinuerligt förbättrats, och deras funktioner har blivit alltmer avancerade. De kan uppnå autonom navigering, undvikande av hinder, planering av vägar, automatisk laddning etc., vilket avsevärt förbättrar effektiviteten och bekvämligheten vid gräsklippning. Denna tekniska innovation ger starkt stöd för den snabba utvecklingen av marknaden för smarta robotgräsklippare.
3. Trender inom miljöskydd och energieffektivitet: Jämfört med traditionella manuella eller bensindrivna gräsklippare har smarta robotgräsklippare lägre buller och utsläpp, vilket resulterar i mindre miljöpåverkan. Driven av trender inom miljöskydd och energieffektivitet väljer ett ökande antal konsumenter smarta robotgräsklippare för att ersätta traditionella klippmetoder.
4. Mogen industrikedja: Kina har en komplett maskinproduktionskedja med stark kapacitet inom forskning och utveckling, design, tillverkning och försäljning. Detta gör det möjligt för Kina att snabbt reagera på den globala marknadens efterfrågan och producera högkvalitativa, konkurrenskraftiga smarta robotgräsklippare. Dessutom förväntas Kinas andel av den globala marknaden för smarta robotgräsklippare öka ytterligare i takt med överföringen och uppgraderingen av globala tillverkningsindustrier.
Sammanfattningsvis, baserat på faktorer som enorm marknadsefterfrågan, möjligheter som teknisk innovation medför, trender inom miljöskydd och energieffektivitet samt en mogen industrikedja, anses smarta robotgräsklippare ha en potentiell marknad på flera miljarder dollar.
Projektmål
Här är en snabb översikt över projektets mål:
✔️ Autonom gräsklippning: Enheten ska kunna klippa gräsmattan automatiskt.
✔️ Bra säkerhetsfunktioner: Enheten måste vara säker, till exempel genom nödstopp vid lyft eller stötande på hinder.
✔️ Inget behov av kantkablar: Vi vill ha flexibilitet och stöd för flera klippområden utan behov av kantkablar.
✔️ Låg kostnad: Den bör vara billigare än kommersiella produkter i mellanklassen.
✔️ Öppen: Jag vill dela kunskap och göra det möjligt för andra att bygga OpenMower.
✔️ Estetiskt: Du ska inte känna dig generad över att använda OpenMower för att klippa gräsmattan.
✔️ Undvikande av hinder: Gräsklipparen ska upptäcka hinder under klippning och undvika dem.
✔️ Regnsensor: Enheten ska kunna upptäcka ogynnsamma väderförhållanden och pausa gräsklippningen tills förhållandena förbättras.
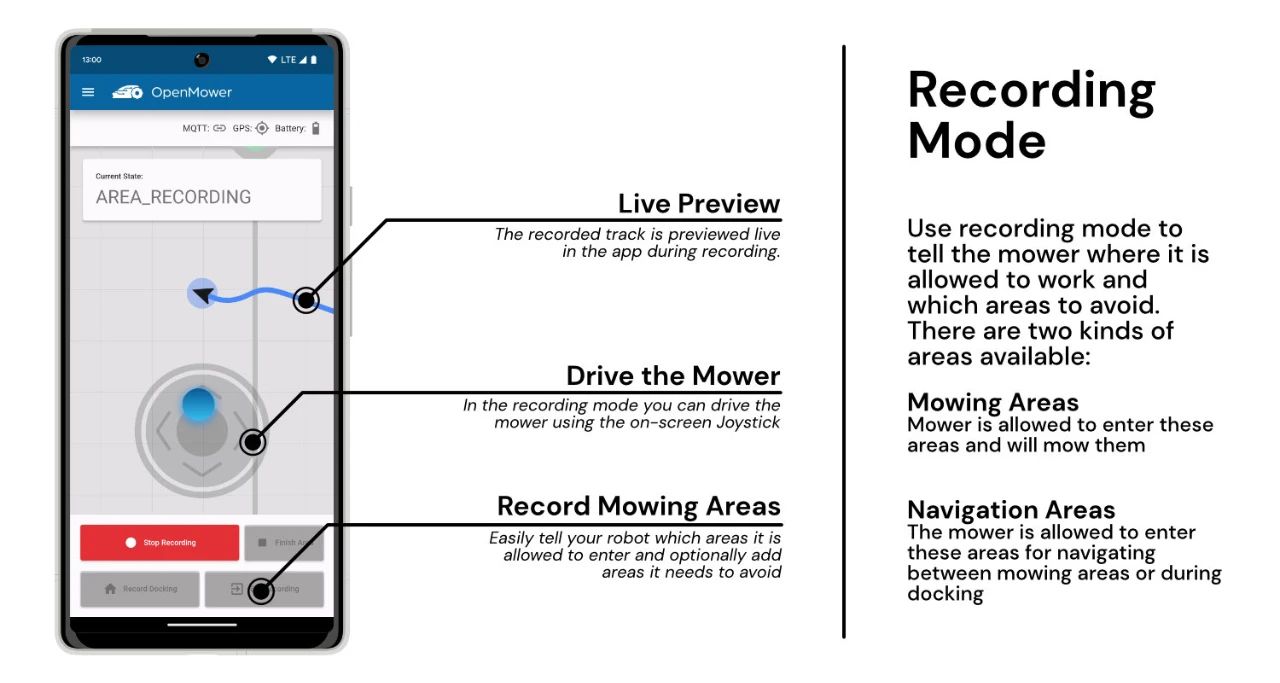
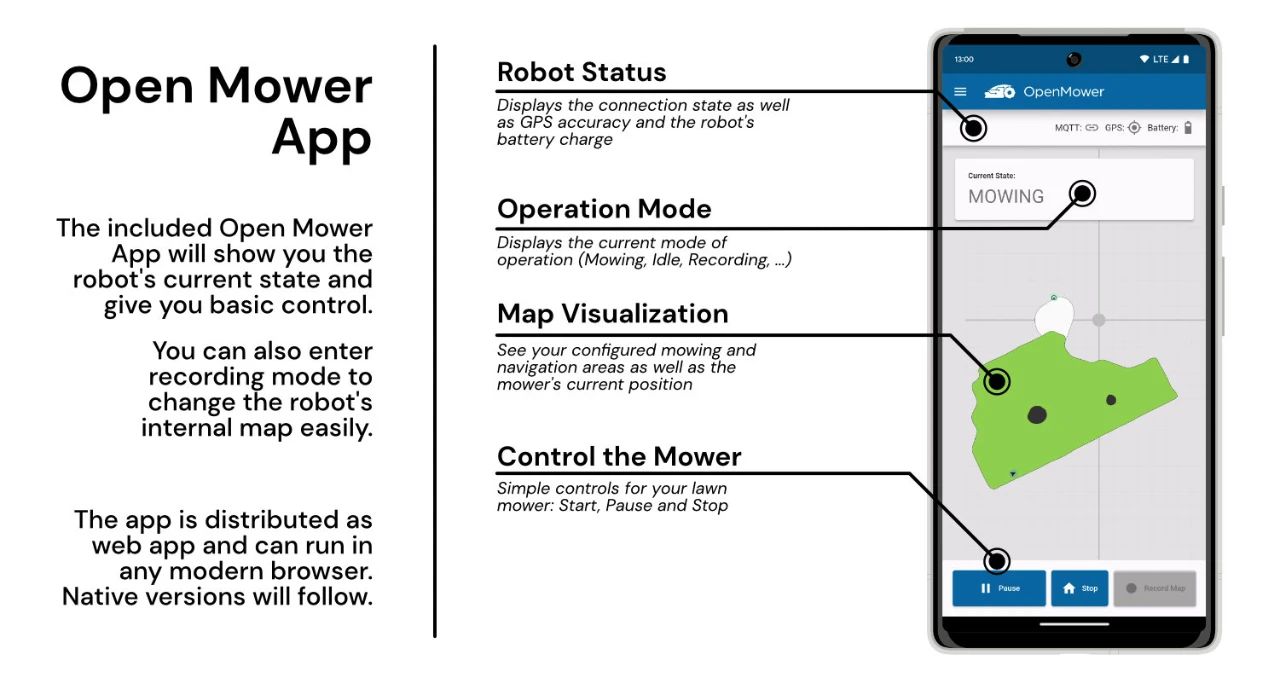
App-presentation
Hårdvara
Hittills har vi en stabil version av moderkortet och två medföljande motorstyrenheter. xESC mini och xESC 2040. För närvarande använder jag xESC mini för bygget, och det fungerar utmärkt. Problemet med den här styrenheten är att det är svårt att hitta dess komponenter. Det är därför vi skapar xESC 2040 baserat på RP2040-chippet. Detta är en lågkostnadsvariant som för närvarande är i experimentstadiet.
Att-göra-lista för hårdvara
Projektmetod
Vi demonterade den billigaste robotgräsklipparen vi kunde hitta (YardForce Classic 500) och blev positivt överraskade av hårdvarans kvalitet:
Kugghjulsinducerade borstlösa motorer för hjulen
Borstlösa motorer för själva gräsklipparen
Den övergripande strukturen verkade robust, vattentät och väl genomtänkt
Alla komponenter anslöts med standardkontakter, vilket gjorde hårdvaruuppgraderingar enkla.
Gräsklipparens moderkort

ROS-arbetsyta
Den här mappen fungerar som ROS-arbetsyta som används för att bygga OpenMower ROS-programvaran. Arkivet innehåller ROS-paket för att styra OpenMower.
Den refererar också till andra repositorier (bibliotek) som behövs för att bygga programvaran. Detta gör att vi kan spåra de exakta versionerna av paketen som används i varje utgåva för att säkerställa kompatibilitet. För närvarande inkluderar den följande repositorier:
slic3r_täckningsplanerare:En täckningsplanerare för 3D-skrivare baserad på Slic3r-programvaran. Denna används för att planera klippvägarna.
teb_lokal_planerare:Den lokala planeraren som låter roboten navigera runt hinder och följa den globala banan samtidigt som den följer kinematiska begränsningar.
xesc_ros:ROS-gränssnittet för xESC-motorstyrenheten.

I Europa och Amerika har många hushåll egna trädgårdar eller gräsmattor på grund av de rikliga markresurserna, vilket kräver regelbunden gräsklippning. Traditionella klippningsmetoder innebär ofta att man anställer arbetskraft, vilket inte bara medför höga kostnader utan också kräver avsevärd tid och ansträngning för övervakning och hantering. Därför har intelligenta automatiserade gräsklippare stor marknadspotential.
Automatiserade gräsklippare integrerar avancerade sensorer, navigationssystem och artificiell intelligens, vilket gör att de autonomt kan klippa gräsmattor, navigera hinder och planera stigar. Användare behöver bara ställa in klippyta och höjd, och den automatiserade gräsklipparen kan slutföra klippningen automatiskt, vilket avsevärt förbättrar effektiviteten och sparar arbetskostnader.
Dessutom har automatiserade gräsklippare fördelarna att de är miljövänliga och energieffektiva. Jämfört med traditionella manuella eller bensindrivna gräsklippare producerar automatiserade gräsklippare lägre buller och utsläpp, vilket resulterar i minimal miljöpåverkan. Dessutom kan automatiserade gräsklippare justera klippstrategier baserat på gräsmattans faktiska förhållanden, vilket undviker energislöseri.
För att komma in på denna marknad och uppnå framgång måste dock flera faktorer beaktas. För det första måste tekniken för automatiserade gräsklippare vara mogen och tillförlitlig för att möta användarnas praktiska behov. För det andra är prissättning också en avgörande faktor, eftersom alltför höga priser kan hindra produktimplementering. Slutligen är det viktigt att etablera ett omfattande försäljnings- och servicenätverk för att ge användarna bekväm support och service.
Sammanfattningsvis har intelligenta automatiserade gräsklippare enorm potential på de europeiska och amerikanska marknaderna. För att uppnå kommersiell framgång krävs dock insatser inom teknik, prissättning och tjänster.

Vem kan ta vara på denna mångmiljardmöjlighet?
Teknisk forskning och utveckling:Kontinuerligt investera i FoU-resurser för att förbättra intelligensen, effektiviteten och tillförlitligheten hos automatiserade gräsklippare. Fokusera på att förstå användarnas behov och myndighetskrav på de europeiska och amerikanska marknaderna för att säkerställa att produkterna uppfyller relevanta standarder.
Varumärkesbyggande:Etablera varumärkesimagen för kinesiska smarta gräsklippare på den internationella marknaden för att öka konsumenternas medvetenhet och förtroende för kinesiska produkter. Detta kan uppnås genom deltagande i internationella utställningar och gemensam marknadsföring med lokala partners i Europa och Amerika.
Försäljningskanaler:Etablera ett omfattande försäljningsnätverk och servicesystem för att säkerställa smidigt inträde av produkter på de europeiska och amerikanska marknaderna och tillhandahålla teknisk support och tjänster i rätt tid. Överväg att samarbeta med lokala återförsäljare och distributörer i Europa och Amerika för att utöka försäljningskanalerna.
Publiceringstid: 22 mars 2024